様々なプロジェクト事例
プロジェクトで活躍する
船舶機器
01
海底掘削調査
メタンハイドレートなど海底資源の調査のため、ドリルを用いて海底掘削調査を行います。
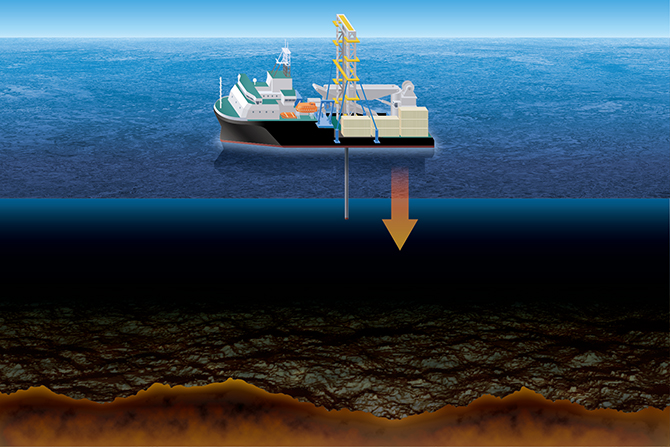 掘削ポイントに到着後、DPSで船体を定点保持します。※ロボット・ドリル操作:専門チームが乗船し行います。
掘削ポイントに到着後、DPSで船体を定点保持します。※ロボット・ドリル操作:専門チームが乗船し行います。
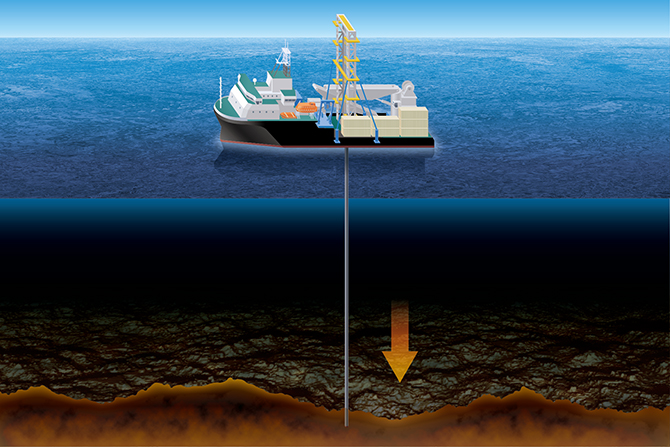 パイプドリルを連結し掘削します。ドリルは325mまで繋げることが可能です。
パイプドリルを連結し掘削します。ドリルは325mまで繋げることが可能です。
 表層型メタンハイドレートの浅層掘削(コア採取)調査(2015年)
表層型メタンハイドレートの浅層掘削(コア採取)調査(2015年)
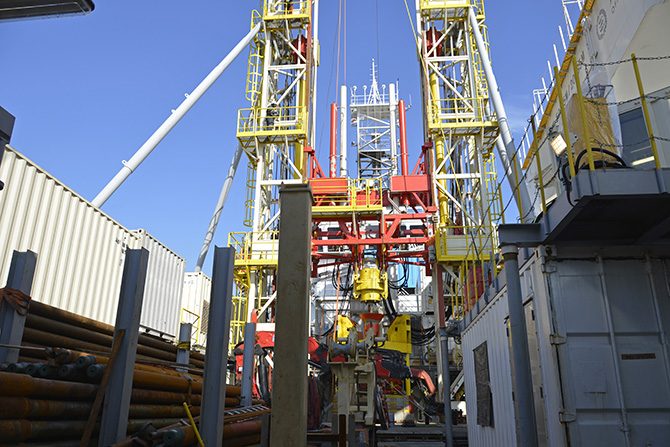 デッキ中央のパイプドリル
デッキ中央のパイプドリル
ページ上部へ
02
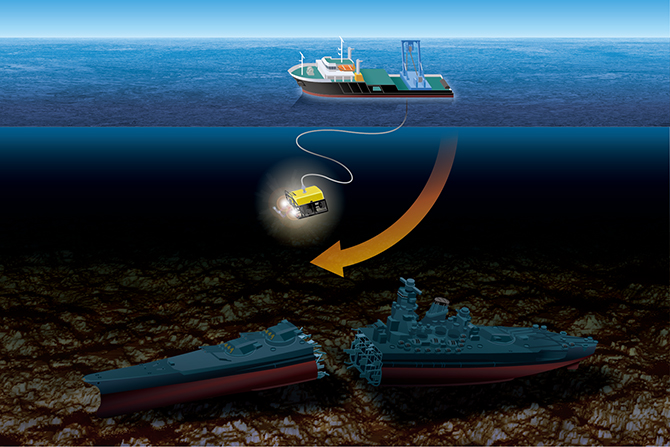
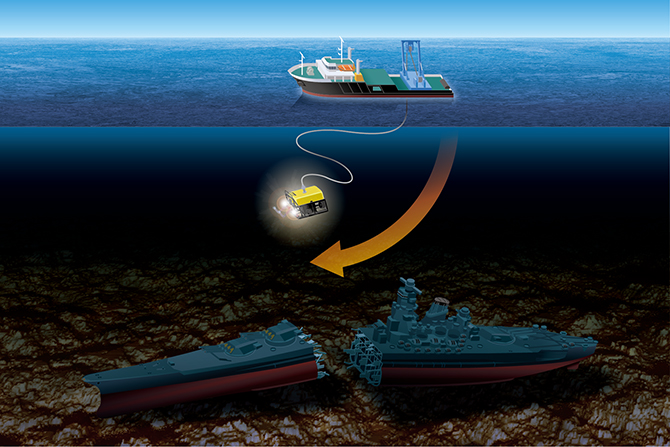
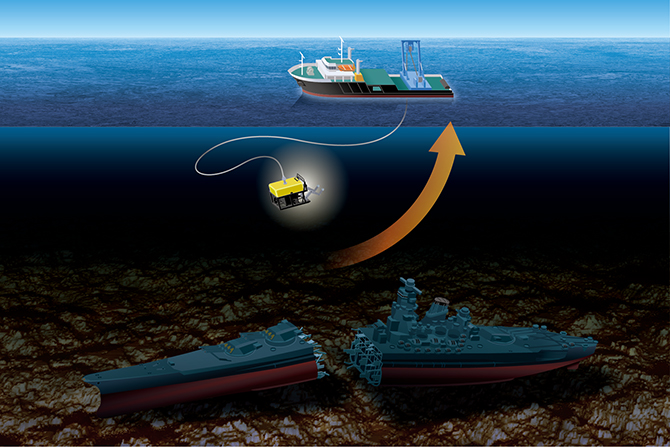
戦艦大和調査
2016年5月水中ロボット(ROV)を用い、戦艦大和の撮影調査を実施しました。
 水中ロボット(ROV)を投入します。船員は、投入作業を補助します。※ロボット・ドリル操作:専門チームが乗船し行います。
水中ロボット(ROV)を投入します。船員は、投入作業を補助します。※ロボット・ドリル操作:専門チームが乗船し行います。
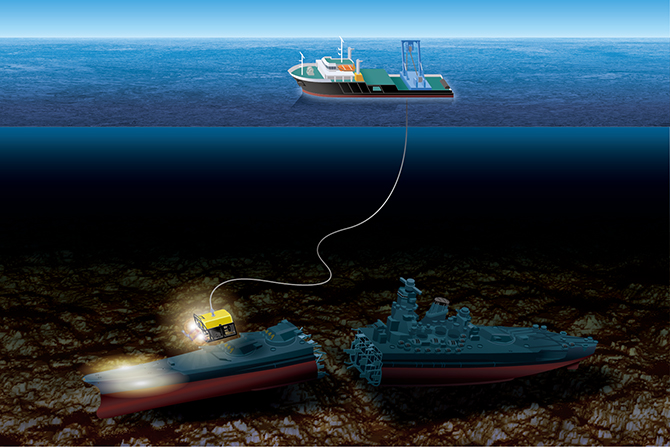 水中ロボット(ROV)で撮影します。航海士はケーブルが切れないようにDPSを使用し、操船をします。
水中ロボット(ROV)で撮影します。航海士はケーブルが切れないようにDPSを使用し、操船をします。
 撮影終了後、水中ロボット(ROV)を回収します。船員は、回収作業を補助します。
撮影終了後、水中ロボット(ROV)を回収します。船員は、回収作業を補助します。
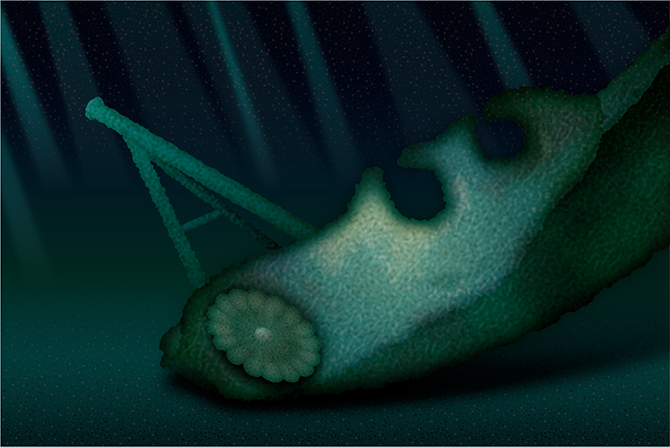 撮影イメージ図
撮影イメージ図
ページ上部へ
03
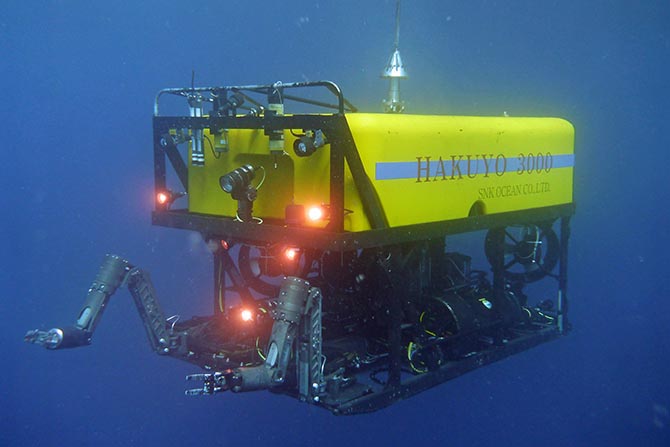
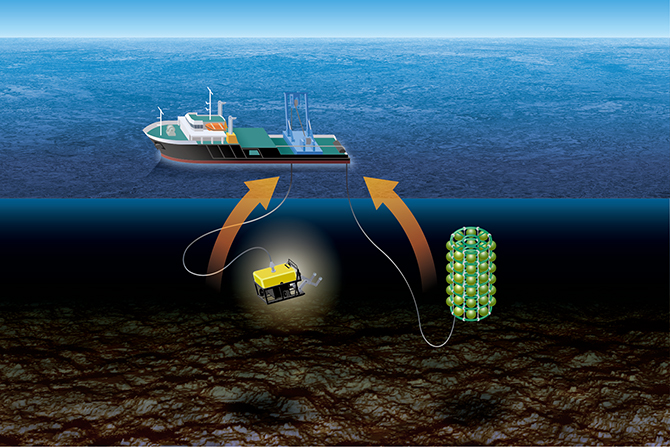
ROV海底調査
水中ロボット(ROV)を用い、海底における各種撮影調査・作業を行います。
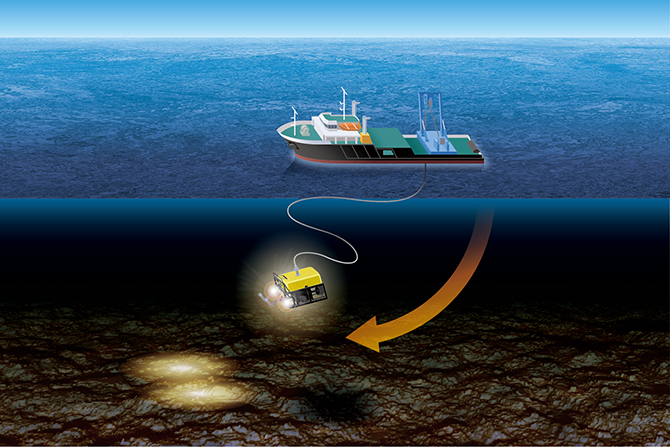 調査海域に到着したら、水中ロボット(ROV)を投入します。船員は投入作業を補助します。※ロボット操作:専門チームが乗船し行います。
調査海域に到着したら、水中ロボット(ROV)を投入します。船員は投入作業を補助します。※ロボット操作:専門チームが乗船し行います。
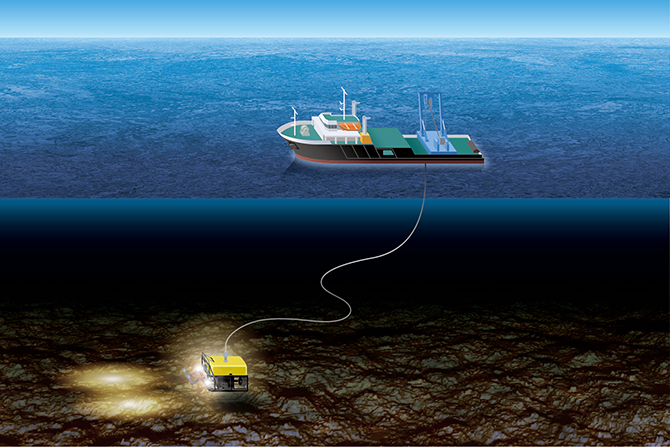 水中ロボット(ROV)オペレーターが船上から遠隔操作で深海の撮影・作業を行います。
水中ロボット(ROV)オペレーターが船上から遠隔操作で深海の撮影・作業を行います。
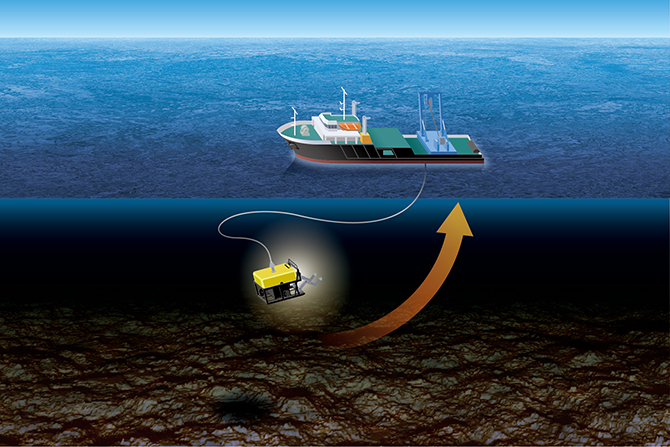 作業が終了したら、水中ロボット(ROV)を回収します。船員は回収作業を補助します。
作業が終了したら、水中ロボット(ROV)を回収します。船員は回収作業を補助します。
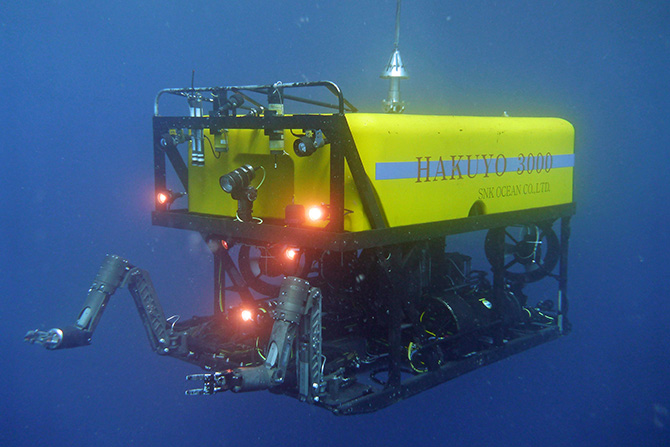 水中ロボット(ROV)
水中ロボット(ROV)
ページ上部へ
04
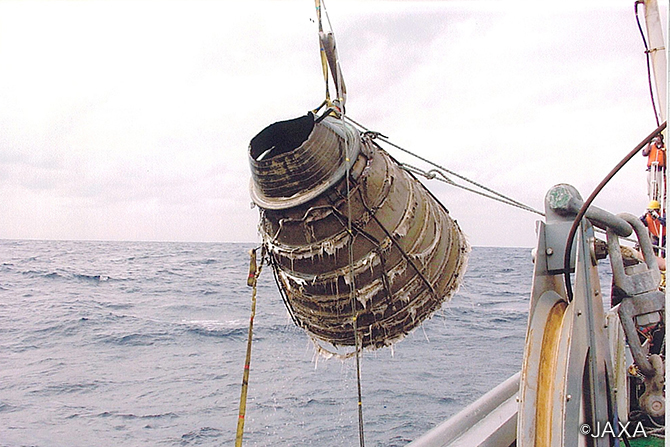
沈没物引揚
沈没した物体を、海中で水中ロボット(ROV)を用いて作業し引揚を行います。
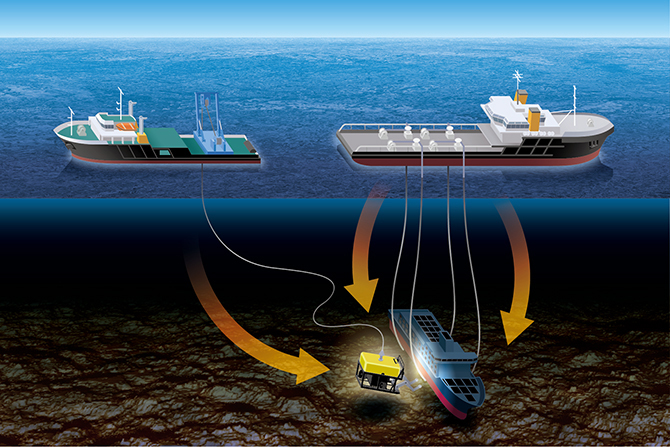 1隻はワイヤーを投入し、1隻が水中ロボット(ROV)を投入し、ワイヤーを沈没物に固定します。※ロボット操作:専門チームが乗船し行います。
1隻はワイヤーを投入し、1隻が水中ロボット(ROV)を投入し、ワイヤーを沈没物に固定します。※ロボット操作:専門チームが乗船し行います。
 水中ロボット(ROV)で、吊り上げ用ワイヤーをセットします。
水中ロボット(ROV)で、吊り上げ用ワイヤーをセットします。
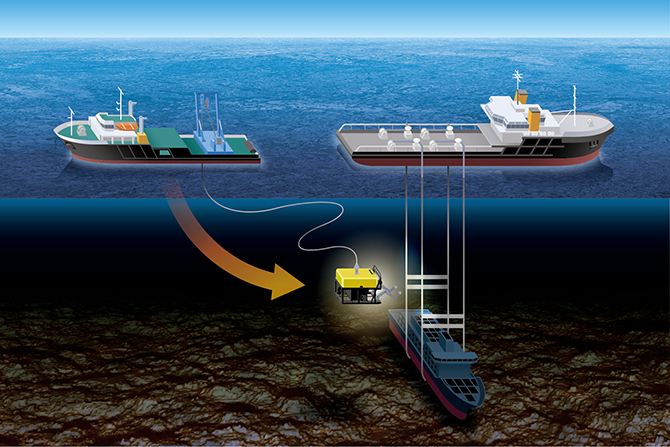
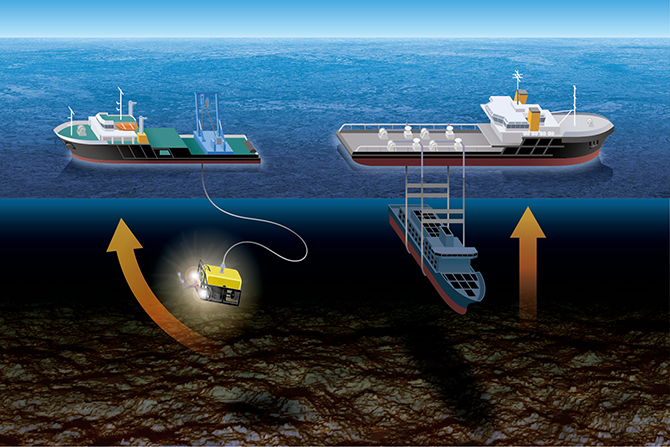 水中ロボット(ROV)で監視しながら、沈没物引揚を行います。
水中ロボット(ROV)で監視しながら、沈没物引揚を行います。
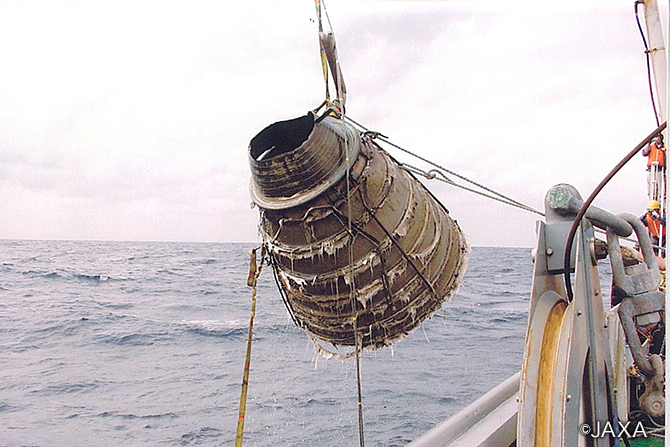 種子島・H2ロケット部品引揚の様子
種子島・H2ロケット部品引揚の様子
ページ上部へ
05
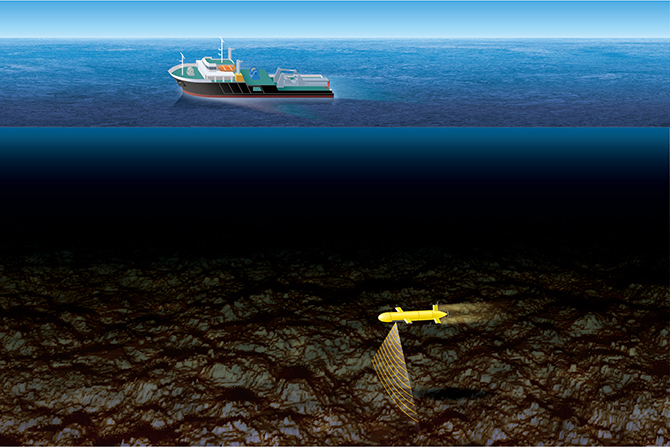
AUV地形調査
水中ドローン(AUV)を用い、海底地形調査を行います。
 調査海域水中ドローン(AUV)を投入します。船員は投入作業を補助します。※ロボット操作:専門チームが乗船し行います。
調査海域水中ドローン(AUV)を投入します。船員は投入作業を補助します。※ロボット操作:専門チームが乗船し行います。
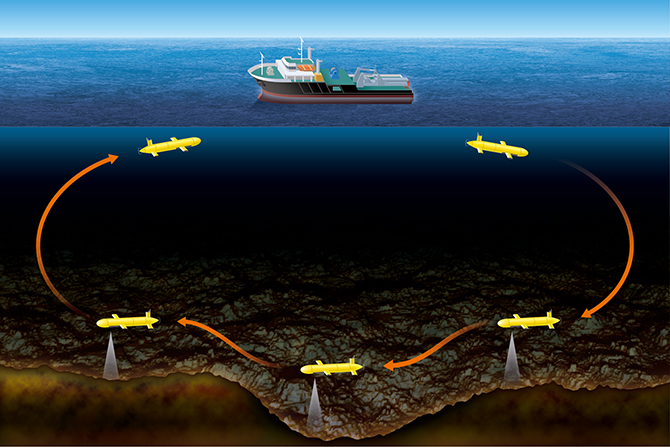 水中ドローン(AUV)は自力で地形データ収集を行った後、回収します。船員は回収作業を補助します。
水中ドローン(AUV)は自力で地形データ収集を行った後、回収します。船員は回収作業を補助します。
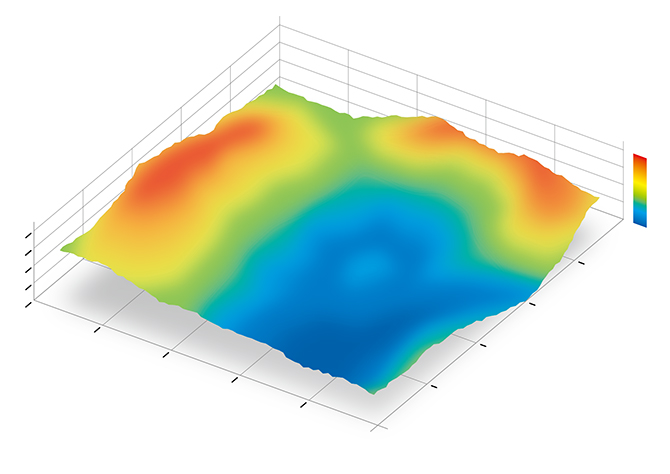 水中ドローン(AUV)による海底地形データ(イメージ)
水中ドローン(AUV)による海底地形データ(イメージ)
ページ上部へ
06
サルベージ
故障・座礁した船舶を、指定の港まで曳航します。
 サルベージ要請連絡を受けたら直ちに準備をはじめ現場に向け出港します。
サルベージ要請連絡を受けたら直ちに準備をはじめ現場に向け出港します。
 現地到着後、甲板・機関全員で作業します。相手船に乗り移り、曳航索を取り付けます。
現地到着後、甲板・機関全員で作業します。相手船に乗り移り、曳航索を取り付けます。
 小型艇に乗る船員
小型艇に乗る船員
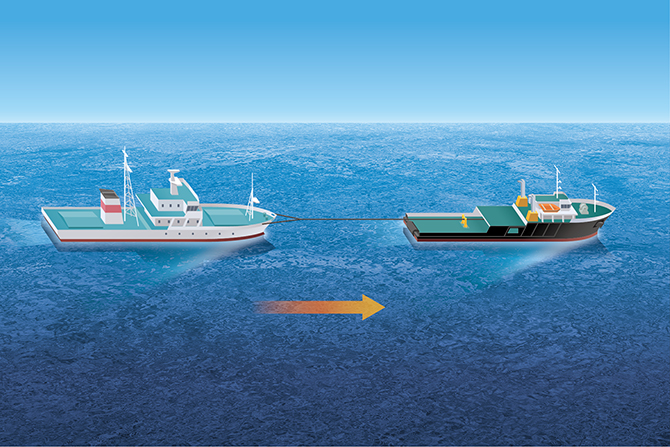 船舶を目的地まで曳航します。
船舶を目的地まで曳航します。
 大型船舶を曳航することもあります。
大型船舶を曳航することもあります。
 荒れた海域での作業もあります。
荒れた海域での作業もあります。
ページ上部へ
07
浮漁礁回収
海の中層に設置した浮体式人工漁礁を、水中ロボット(ROV)を用い回収します。
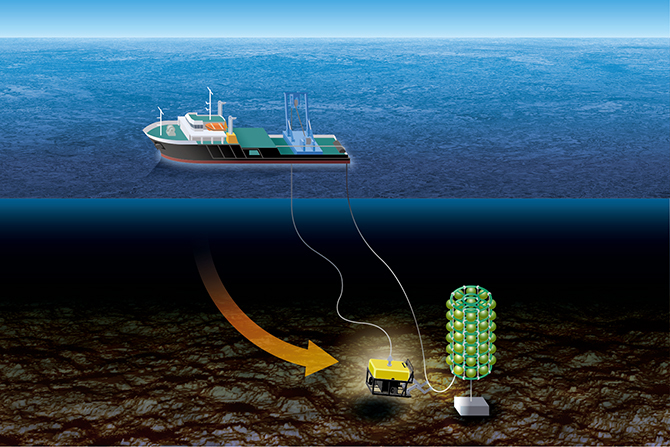 水中ロボット(ROV)投入し、浮漁礁の係留索をカッターで切断、揚収します。※ロボット操作:専門チームが乗船し行います。
水中ロボット(ROV)投入し、浮漁礁の係留索をカッターで切断、揚収します。※ロボット操作:専門チームが乗船し行います。
 ウインチを使用して係留索を巻き上げます。
ウインチを使用して係留索を巻き上げます。
 浮漁礁
浮漁礁
ページ上部へ
08
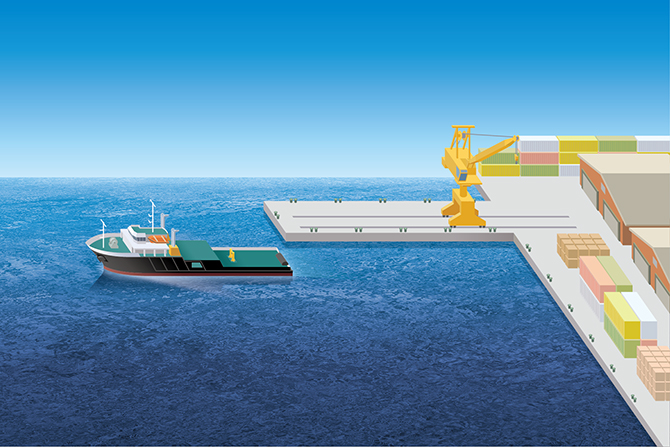
洋上へ物資補給
洋上の船舶やリグ等へ、物資・資材の補給・回収を行います。
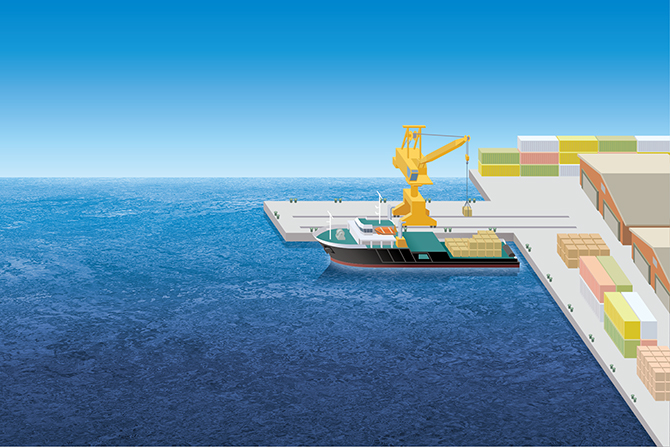 補給する資材(コンテナ・パイプ・セメント)を積み込みます。
補給する資材(コンテナ・パイプ・セメント)を積み込みます。
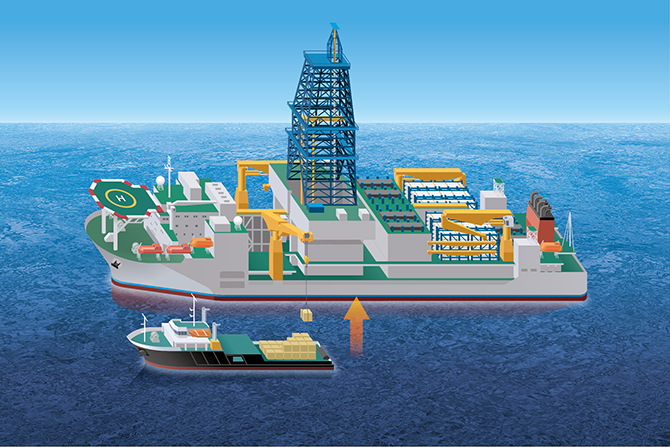 洋上での船舶・石油プラットフォーム等にDPSを使用して接近し、安全に資材を届けます。
洋上での船舶・石油プラットフォーム等にDPSを使用して接近し、安全に資材を届けます。
 回収資材を受け取ることもあり、岸壁まで運搬します。
回収資材を受け取ることもあり、岸壁まで運搬します。
 実際の様子
実際の様子
ページ上部へ
01
DPS(自動船位保持装置)
風力・波力・潮流などの影響下においても、GPS等の測位情報を基に、アジマススラスターやバウスラスターをコンピューター制御で動かし定点保持や任意の移動を可能とする装置です。
 DPS(ダイナミック・ポジショニング・システム)
DPS(ダイナミック・ポジショニング・システム)
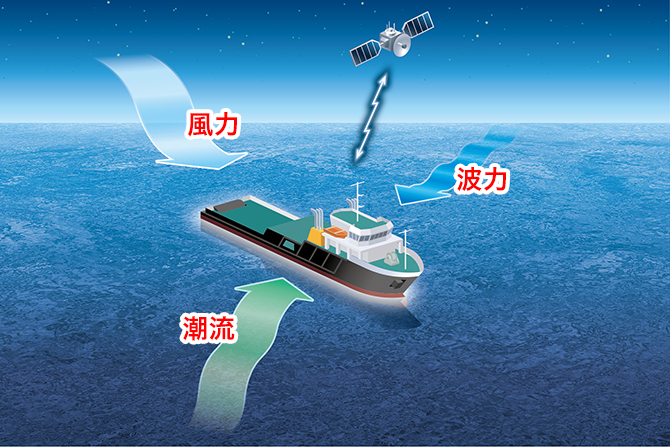 風、潮流、波など外力がある洋上で半径1m程度の範囲で船体を定点保持することが可能です。
風、潮流、波など外力がある洋上で半径1m程度の範囲で船体を定点保持することが可能です。
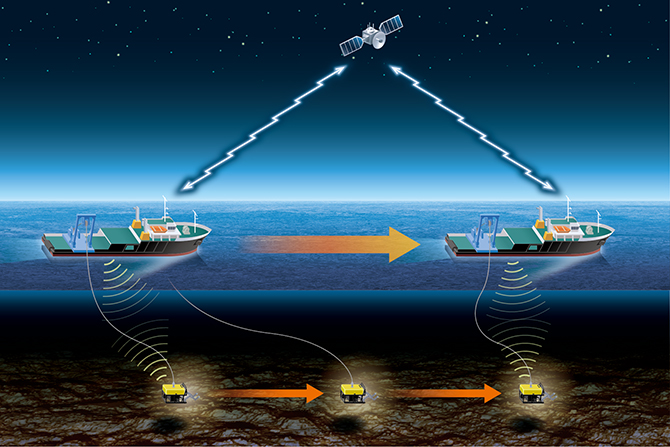 海中に潜航する水中ロボット(ROV)の動きに船舶が一定距離を取り、追従して航行します。
海中に潜航する水中ロボット(ROV)の動きに船舶が一定距離を取り、追従して航行します。
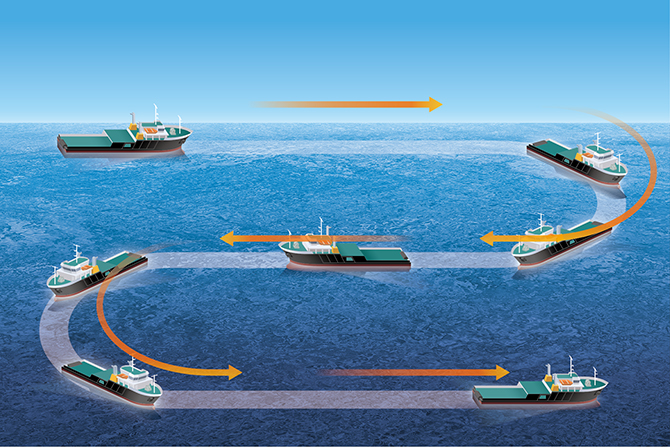 定めたポジション、定めた半径・速度で航行することができます。
定めたポジション、定めた半径・速度で航行することができます。
ページ上部へ
02
アジマススラスター
プロペラの推力方向を 360 °全方向に自由に変えられる構造となっており、両舷の操作を組み合わせることで優れた操船性能を発揮します。
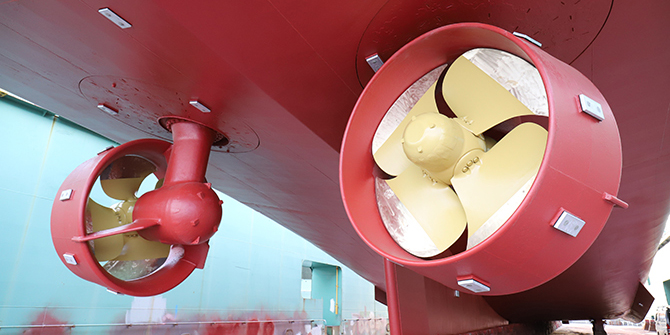 水平方向に360度プロペラが回転します。
水平方向に360度プロペラが回転します。
 船を任意の方向に移動させたり、現在位置を正確に維持しやすくなります。
船を任意の方向に移動させたり、現在位置を正確に維持しやすくなります。